I'm currently working on a pixel art game with a 2d tile map and I am aware that to stop texture bleeding you need to pad out each tile. I also find the best result if you pad out each tile by 'stretching' its edge. For example:
becomes -------->
However, to me, padding out each tile manually is a bit tedious and also makes the tilesheet harder to edit since you need to remember to re-pad every time. I'm wondering if there is any software out there which can take in a tilesheet and do all the padding for you?
I'd prefer to edit the tilesheet all in one place rather than edit tiles separately and pack them together. Or is there some way of storing each tile separately but editing them together as though they were in a single tilesheet, and then using a texture packer to pack them together and do everything you need to do for the padding?
Few games have left such an immediate impression on me as The Collage Atlas. Here are anchors dropping from a white sky, razor-thin keys opening butterfly locks, and books swarming in the wakes of ships as if they were murmurations of starlings. Brought to life with a hand-drawn pen-and-ink aesthetic, the game's calm spaces and wealth of illustrative detail work together to encourage self-reflection. Having immersed myself in the game over the last few weeks, I wanted to know more. That's why I find myself talking to its solo developer, John Evelyn. He's the man who built this game and literally drew it into life.
It took Evelyn four and a half years to create The Collage Atlas. He tells me it began as a picture book designed to help people through difficult times - a picture book that would have worked alongside a companion app. "I initially assumed that the best way to talk about the things I want to discuss would be through a picture book," he explains. But the medium was always secondary to the message he wished to convey.
"I wanted to explore the idea that when life becomes particularly challenging - perhaps we go through traumatic events or things completely out of our hands. We start to feel that our sense of agency is somewhat undermined." Evelyn pauses here. "That we don't have meaningful authorship over our own lives. That's something that I and many other people have experienced."
We’ve had about a decade of pent-up questions about an all-electric productized version of
Atlas, and we were lucky enough to speak with
Boston Dynamics CEO Robert Playter to learn more about where this robot came from and how it’s going to make commercial humanoid robots (finally) happen.
Robert Playter was the Vice President of Engineering at Boston Dynamics starting in 1994, which I’m pretty sure was back when Boston Dynamics still intended to be a modeling and simulation company rather than a robotics company. Playter became the CEO in 2019, helping the company make the difficult transition from R&D to commercial products with
Spot, Stretch, and now (or very soon)
Atlas.
We talked with Playter about what the heck took Boston Dynamics so long to make this robot, what the vision is for Atlas as a product, all that extreme flexibility, and what comes next.
Robert Playter: Boston Dynamics has built an all-electric humanoid. It’s our newest generation of what’s been an almost 15-year effort in developing humanoids. We’re going to launch it as a product, targeting industrial applications, logistics, and places that are much more diverse than where you see Stretch—heavy objects with complex geometry, probably in manufacturing type environments. We’ve built our first robot, and we believe that’s really going to set the bar for the next generation of capabilities for this whole industry.
What took you so long?!
Playter: Well, we wanted to convince ourselves that we knew how to make a humanoid product that can handle a great diversity of tasks—much more so than our previous generations of robots—including at-pace bimanual manipulation of the types of heavy objects with complex geometry that we expect to find in industry. We also really wanted to understand the use cases, so we’ve done a lot of background work on making sure that we see where we can apply these robots fruitfully in industry.
We’ve obviously been working on this machine for a while, as we’ve been doing parallel development with our legacy Atlas. You’ve probably seen some of the
videos of Atlas moving struts around—that’s the technical part of proving to ourselves that we can make this work. And then really designing a next generation machine that’s going to be an order of magnitude better than anything the world has seen.
“We’re not anxious to just show some whiz-bang tech, and we didn’t really want to indicate our intent to go here until we were convinced that there is a path to a product.”
—Robert Playter, Boston Dynamics
With Spot, it felt like Boston Dynamics developed the product first, without having a specific use case in mind: you put the robot out there and let people discover what it was good for. Is your approach different with Atlas?
Playter: You’re absolutely right. Spot was a technology looking for a product, and it’s taken time for us to really figure out the product market fit that we have in industrial inspection. But the challenge of that experience has left us wiser about really identifying the target applications before you say you’re going to build these things at scale.
Stretch is very different, because it had a clear target market. Atlas is going to be more like Stretch, although it’s going to be way more than a single task robot, which is kind of what Stretch is. Convincing ourselves that we could really generalize with Atlas has taken a little bit of time. This is going to be our third product in about four years. We’ve learned so much, and the world is different from that experience.
Is your vision for Atlas one of a general purpose robot?
Playter: It definitely needs to be a multi-use case robot. I believe that because I don’t think there’s very many examples where a single repetitive task is going to warrant these complex robots. I also think, though, that the practical matter is that you’re going to have to focus on a class of use cases, and really making them useful for the end customer. The lesson we’ve learned with both Spot and Stretch is that it’s critical to get out there and actually understand what makes this robot valuable to customers while making sure you’re building that into your development cycle. And if you can start that before you’ve even launched the product, then you’ll be better off.
How does thinking of this new Atlas as a product rather than a research platform change things?
Playter: I think the research that we’ve done over the past 10 or 15 years has been essential to making a humanoid useful in the first place. We focused on dynamic balancing and mobility and being able to pick something up and still maintain that mobility—those were research topics of the past that we’ve now figured out how to manage and are essential, I think, to doing useful work. There’s still a lot of work to be done on generality, so that humanoids can pick up any one of a thousand different parts and deal with them in a reasonable way. That level of generality hasn’t been proven yet; we think there’s promise, and that AI will be one of the tools that helps solve that. And there’s still a lot of product prototyping and iteration that will come out before we start building massive numbers of these things and shipping them to customers.
“This robot will be stronger at most of its joints than a person, and even an elite athlete, and will have a range of motion that exceeds anything a person can ever do.”
—Robert Playter, Boston Dynamics
For a long time, it seemed like hydraulics were the best way of producing powerful dynamic motions for robots like Atlas. Has that now changed?
Playter: We first experimented with that with the launch of Spot. We had the same issue years ago, and discovered that we could build powerful lightweight electric motors that had the same kind of responsiveness and strength, or let’s say sufficient responsiveness and strength, to really make that work. We’ve designed an even newer set of really compact actuators into our electric Atlas, which pack the strength of essentially an elite human athlete into these tiny packages that make an electric humanoid feasible for us. So, this robot will be stronger at most of its joints than a person, and even an elite athlete, and will have a range of motion that exceeds anything a person can ever do. We’ve also compared the strength of our new electric Atlas to our hydraulic Atlas, and the electric Atlas is stronger.
In the context of Atlas’ range of motion, that introductory video was slightly uncomfortable to watch, which I’m sure was deliberate. Why introduce the new Atlas in that way?
Playter: These high range of motion actuators are going to enable a unique set of movements that ultimately will let the robot be very efficient. Imagine being able to turn around without having to take a bunch of steps to turn your whole body instead. The motions we showed [in the video] are ones where our engineers were like, “hey, with these joints, we could get up like this!” And it just wasn’t something we had that really thought about before. This flexibility creates a palette that you can design new stuff on, and we’re already having fun with it and we decided we wanted to share that excitement with the world.
“Everybody will buy one robot—we learned that with Spot. But they won’t start by buying fleets, and you don’t have a business until you can sell multiple robots to the same customer.”
—Robert Playter, Boston Dynamics
This does seem like a way of making Atlas more efficient, but I’ve heard from other folks working on humanoids that it’s important for robots to move in familiar and predictable ways for people to be comfortable working around them. What’s your perspective on that?
Playter: I do think that people are going to have to become familiar with our robot; I don’t think that means limiting yourself to human motions. I believe that ultimately, if your robot is stronger or more flexible, it will be able to do things that humans can’t do, or don’t want to do.
One of the real challenges of making a product useful is that you’ve got to have sufficient productivity to satisfy a customer. If you’re slow, that’s hard. We learned that with Stretch. We had two generations of Stretch, and the first generation did not have a joint that let it pivot 180 degrees, so it had to ponderously turn around between picking up a box and dropping it off. That was a killer. And so we decided “nope, gotta have that rotational joint.” It lets Stretch be so much faster and more efficient. At the end of the day, that’s what counts. And people will get used to it.
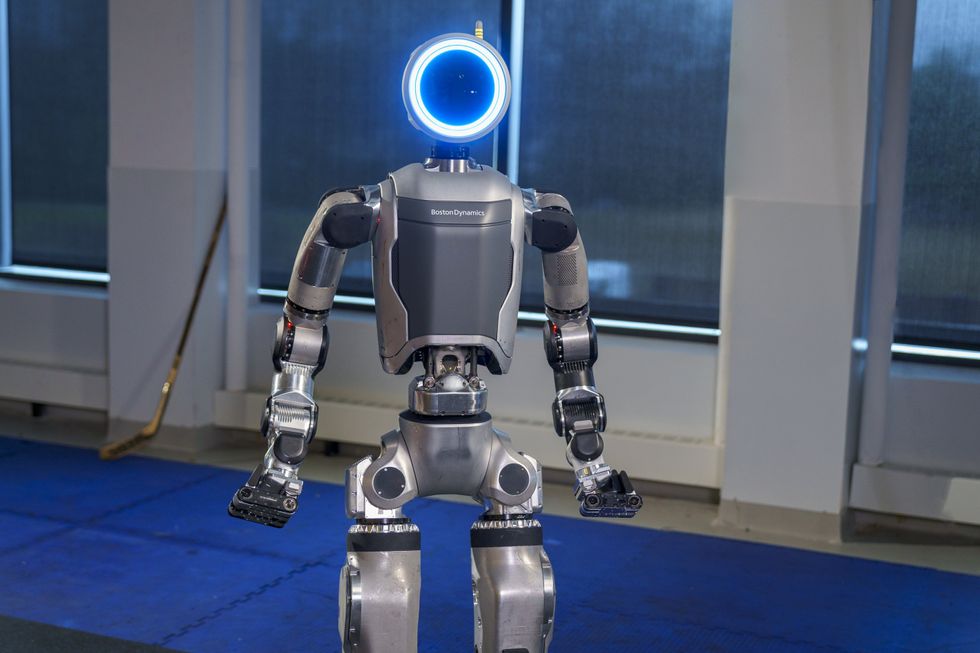
What can you tell me about the head?
Boston Dynamics CEO Robert Playter said the head on the new Atlas robot has been designed not to mimic the human form but rather “to project something else: a friendly place to look to gain some understanding about the intent of the robot.”Boston Dynamics
Playter: The old Atlas did not have an articulated head. But having an articulated head gives you a tool that you can use to indicate intent, and there are integrated lights which will be able to communicate to users. Some of our original concepts had more of a [human] head shape, but for us they always looked a little bit threatening or dystopian somehow, and we wanted to get away from that. So we made a very purposeful decision about the head shape, and our explicit intent was for it not to be human-like. We’re trying to project something else: a friendly place to look to gain some understanding about the intent of the robot.
The design borrows from some friendly shapes that we’d seen in the past. For example, there’s the old Pixar lamp that everybody fell in love with decades ago, and that informed some of the design for us.
How do you think the decade(s) of experience working on humanoids as well as your experience commercializing Spot will benefit you when it comes to making Atlas into a product?
Playter: This is our third product, and one of the things we’ve learned is that it takes way more than some interesting technology to make a product work. You have to have a real use case, and you have to have real productivity around that use case that a customer cares about. Everybody will buy one robot—we learned that with Spot. But they won’t start by buying fleets, and you don’t have a business until you can sell multiple robots to the same customer. And you don’t get there without all this other stuff—the reliability, the service, the integration.
When we launched Spot as a product several years ago, it was really about transforming the whole company. We had to take on all of these new disciplines: manufacturing, service, measuring the quality and reliability of our robots and then building systems and tools to make them steadily better. That transformation is not easy, but the fact that we’ve successfully navigated through that as an organization means that we can easily bring that mindset and skill set to bear as a company. Honestly, that transition takes two or three years to get through, so all of the brand new startup companies out there who have a prototype of a humanoid working—they haven’t even begun that journey.
There’s also cost. Building something effectively at a reasonable cost so that you can sell it at a reasonable cost and ultimately make some money out of it, that’s not easy either. And frankly, without the support of
Hyundai which is of course a world-class manufacturing expert, it would be really challenging to do it on our own.
So yeah, we’re much more sober about what it takes to succeed now. We’re not anxious to just show some whiz-bang tech, and we didn’t really want to indicate our intent to go here until we were convinced that there is a path to a product. And I think ultimately, that will win the day.
What will you be working on in the near future, and what will you be able to share?
Playter: We’ll start showing more of the dexterous manipulation on the new Atlas that we’ve already shown on our legacy Atlas. And we’re targeting proof of technology testing in factories at Hyundai Motor Group [HMG] as early as next year. HMG is really excited about this venture; they want to transform their manufacturing and they see Atlas as a big part of that, and so we’re going to get on that soon.
What do you think other robotics folks will find most exciting about the new Atlas?
Playter: Having a robot with so much power and agility packed into a relatively small and lightweight package. I’ve felt honored in the past that most of these other companies compare themselves to us. They say, “well, where are we on the Boston Dynamics bar?” I think we just raised the bar. And that’s ultimately good for the industry, right? People will go, “oh, wow, that’s possible!” And frankly, they’ll start chasing us as fast as they can—that’s what we’ve seen so far. I think it’ll end up pulling the whole industry forward.
Yesterday, Boston Dynamics bid farewell to the iconic Atlas humanoid robot. Or, the hydraulically-powered version of Atlas, anyway—if you read between the lines of the video description (or even just read the actual lines of the video description), it was pretty clear that although hydraulicAtlas was retiring, it wasn’t the end of the Atlas humanoid program at Boston Dynamics. In fact, Atlas is already back, and better than ever.
Boston Dynamics’ new electric humanoid has been simultaneously one of the worst and best kept secrets in robotics over the last year or so. What I mean is that it seemed obvious, or even inevitable, that Boston Dynamics would take the expertise in humanoids that it developed with Atlas and combine that with its experience productizing a fully electric system like Spot. But just because something seems inevitable doesn’t mean it actually is inevitable, and Boston Dynamics has done an admirable job of carrying on as normal while building a fully electric humanoid from scratch. And here it is:
It’s all new, it’s all electric, and some of those movements make me slightly uncomfortable (we’ll get into that in a bit). The blog post accompanying the video is sparse on technical detail, but let’s go through the most interesting parts:
A decade ago, we were one of the only companies putting real R&D effort into humanoid robots. Now the landscape in the robotics industry is very different.
In 2010, we took a look at all the humanoid robots then in existence. You could, I suppose, argue that Honda was putting real R&D effort into ASIMO back then, but yeah, pretty much all those other humanoid robots came from research rather than industry. Now, it feels like we’re up to our eyeballs in commercial humanoids, but over the past couple of years, as startups have appeared out of nowhere with brand new humanoid robots, Boston Dynamics (to most outward appearances) was just keepin’ on with that R&D. Today’s announcement certainly changes that.
We are confident in our plan to not just create an impressive R&D project, but to deliver a valuable solution. This journey will start with Hyundai—in addition to investing in us, the Hyundai team is building the next generation of automotive manufacturing capabilities, and it will serve as a perfect testing ground for new Atlas applications.
Boston Dynamics
This is a significant advantage for Boston Dynamics—through Hyundai, they can essentially be their own first customer for humanoid robots, offering an immediate use case in a very friendly transitional environment. Tesla has a similar advantage with Optimus, but Boston Dynamics also has experience sourcing and selling and supporting Spot, which are those business-y things that seem like they’re not the hard part until they turn out to actually be the hard part.
In the months and years ahead, we’re excited to show what the world’s most dynamic humanoid robot can really do—in the lab, in the factory, and in our lives.
World’s most dynamic humanoid, you say? Awesome! Prove it! On video! With outtakes!
The electric version of Atlas will be stronger, with a broader range of motion than any of our previous generations. For example, our last generation hydraulic Atlas (HD Atlas) could already lift and maneuver a wide variety of heavy, irregular objects; we are continuing to build on those existing capabilities and are exploring several new gripper variations to meet a diverse set of expected manipulation needs in customer environments.
Now we’re getting to the good bits. It’s especially notable here that the electric version of Atlas will be “stronger” than the previous hydraulic version, because for a long time hydraulics were really the only way to get the kind of explosively powerful repetitive dynamic motions that enabled Atlas to do jumps and flips. And the switch away from hydraulics enables that extra range of motion now that there aren’t hoses and stuff to deal with.
It’s also pretty clear that the new Atlas is built to continue the kind of work that hydraulic Atlas has been doing, manipulating big and heavy car parts. This is in sharp contrast to most other humanoid robots that we’ve seen, which have primarily focused on moving small objects or bins around in warehouse environments.
We are not just delivering industry-leading hardware. Some of our most exciting progress over the past couple of years has been in software. In addition to our decades of expertise in simulation and model predictive control, we have equipped our robots with new AI and machine learning tools, like reinforcement learning and computer vision to ensure they can operate and adapt efficiently to complex real-world situations.
This is all par for the course now, but it’s also not particularly meaningful without more information. “We will give our robots new capabilities through machine learning and AI” is what every humanoid robotics company (and most other robotics companies) are saying, but I’m not sure that we’re there yet, because there’s an “okay but how?” that needs to happen first. I’m not saying that it won’t happen, just pointing out that until it does happen, it hasn’t happened.
The humanoid form factor is a useful design for robots working in a world designed for people. However, that form factor doesn’t limit our vision of how a bipedal robot can move, what tools it needs to succeed, and how it can help people accomplish more.
Agility Robotics has a similar philosophy with Digit, which has a mostly humanoid form factor to operate in human environments but also uses a non-human leg design because Agility believes that it works better. Atlas is a bit more human-like with its overall design, but there are some striking differences, including both range of motion and the head, both of which we’ll be talking more about.
We designed the electric version of Atlas to be stronger, more dexterous, and more agile. Atlas may resemble a human form factor, but we are equipping the robot to move in the most efficient way possible to complete a task, rather than being constrained by a human range of motion. Atlas will move in ways that exceed human capabilities.
The introductory video with the new Atlas really punches you in the face with this: Atlas is not constrained by human range of motion and will leverage its extra degrees of freedom to operate faster and more efficiently, even if you personally might find some of those motions a little bit unsettling.
Boston Dynamics
Combining decades of practical experience with first principles thinking, we are confident in our ability to deliver a robot uniquely capable of tackling dull, dirty, and dangerous tasks in real applications.
As Marco Hutter pointed out, most commercial robots (humanoids included) are really only targeting tasks that are dull, because dull usually means repetitive, and robots are very good at repetitive. Dirty is a little more complicated, and dangerous is a lot more complicated than that. I appreciate that Boston Dynamics is targeting those other categories of tasks from the outset.
Commercialization takes great engineering, but it also takes patience, imagination, and collaboration. Boston Dynamics has proven that we can deliver the full package with both industry-leading robotics and a complete ecosystem of software, services, and support to make robotics useful in the real world.
There’s a lot more to building a successful robotics company than building a successful robot. Arguably, building a successful robot is not even the hardest part, long term. Having over 1500 Spot robots deployed with customers gives them a well-established product infrastructure baseline to expand from with the new Atlas.
Taking a step back, let’s consider the position that Boston Dynamics is in when it comes to the humanoid space right now.
The new Atlas appears to be a reasonably mature platform with explicit commercial potential, but it’s not yet clear if this particular version of Atlas is truly commercially viable, in terms of being manufacturable and supportable at scale—it’s Atlas 001, after all. There’s likely a huge amount of work that still needs to be done, but it’s a process that the company has already gone through with Spot. My guess is that Boston Dynamics has some catching up to do with respect to other humanoid companies that are already entering pilot projects.
In terms of capabilities, even though the new Atlas hardware is new, it’s not like Boston Dynamics is starting from scratch, since they’re already transferring skills from hydraulic Atlas onto the new platform. But, we haven’t seen the new Atlas doing any practical tasks yet, so it’s hard to tell how far along that is, and it would be premature to assume that hydraulic Atlas doing all kinds of amazing things in YouTube videos implies that electric Atlas can do similar things safely and reliably in a product context. There’s a gap there, possibly an enormous gap, and we’ll need to see more from the new Atlas to understand where it’s at.
And obviously, there’s a lot of competition in humanoids right now, although I’d like to think that the potential for practical humanoid robots to be useful in society is significant enough that there will be room for lots of different approaches. Boston Dynamics was very early to humanoids in general, but they’re somewhat late to this recent (and rather abrupt) humanoid commercialization push. This may not be a problem, especially if Atlas is targeting applications where its strength and flexibility sets it apart from other robots in the space, and if their depth of experience deploying commercial robotic platforms helps them to scale quickly.
Boston Dynamics
An electric Atlas may indeed have been inevitable, and it’s incredibly exciting to (finally!) see Boston Dynamics take this next step towards a commercial humanoid, which would deliver on more than a decade of ambition stretching back through the DARPA Robotics Challenge to PETMAN. We’ve been promised more manipulation footage soon, and Boston Dynamics expects that Atlas will be in the technology demonstration phase in Hyundai factories as early as next year.
In a new video posted today, Boston Dynamics is sending off its hydraulic Atlas humanoid robot. “For almost a decade,” the video description reads, “Atlas has sparked our imagination, inspired the next generations of roboticists, and leapt over technical barriers in the field. Now it’s time for our hydraulic Atlas robot to kick back and relax.”
Hydraulic Atlas has certainly earned some relaxation; Boston Dynamics has been absolutely merciless with its humanoid research program. This isn’t a criticism—sometimes being merciless to your hardware is necessary to push the envelope of what’s possible. And as spectators, we just just get to enjoy it, and this highlight reel includes unseen footage of Atlas doing things well along with unseen footage of Atlas doing things not so well. Which, let’s be honest, is what we’re all really here for.
There’s so much more to the history of Atlas than this video shows. Atlas traces its history back to a DARPA project called PETMAN (Protection Ensemble Test Mannequin), which we first wrote about in 2009, so long ago that we had to dig up our own article on the Wayback Machine. As contributor Mikell Taylor wrote back then:
PETMAN is designed to test the suits used by soldiers to protect themselves against chemical warfare agents. It has to be capable of moving just like a soldier—walking, running, bending, reaching, army crawling—to test the suit’s durability in a full range of motion. To really simulate humans as accurately as possible, PETMAN will even be able to “sweat”.
The DRC featured a [still looking for a collective noun for humanoid robots] of Atlases, and it seemed like Boston Dynamics was hooked on the form factor, because less than a year after the DRC Finals the company announced the next generation of Atlas, which could do some useful things like move boxes around. Every six months or so, Boston Dynamics put out a new Atlas video, with the robot running or jumping or dancing or doing parkour, leveraging its powerful hydraulics to impress us every single time. There was really nothing like hydraulic Atlas in terms of dynamic performance, and you could argue that there still isn’t. This is a robot that will be missed.
The original rendering of Atlas, followed by four generations of the robot.Boston Dynamics/IEEE Spectrum
Now, if you’re wondering why Boston Dynamics is saying “it’s time for our hydraulic Atlas robot to kick back and relax,” rather than just “our Atlas robot,” and if you’re also wondering why the video description ends with “take a look back at everything we’ve accomplished with the Atlas platform “to date,” well, I can’t help you. Some people might attempt to draw some inferences and conclusions from that very specific and deliberate language, but I would certainly not be one of them, because I’m well known for never speculating about anything.
I would, however, point out a few things that have been obvious for a while now. Namely, that:
Boston Dynamics has been focusing fairly explicitly on commercialization over the past several years
Complex hydraulic robots are not product friendly because (among other things) they tend to leave puddles of hydraulic fluid on the carpet
Fully electric commercial humanoids really seems to be where robotics is at right now
There’s nothing at all new in any of this; the only additional piece of information we have is that the hydraulic Atlas is, as of today, retiring. And I’m just going to leave things there.
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
Filmed in July 2017, this video shows us using Atlas to put out a “fire” on our loading dock. This uses a combination of teleoperation and autonomous behaviors through a single, remote computer. Robot built by Boston Dynamics for the DARPA Robotics Challenge in 2013. Software by IHMC Robotics.
I would say that in the middle of a rainstorm is probably the best time to start a fire that you expect to be extinguished by a robot.
Inspired by caregiving experts, we proposed a bimanual interactive robotic dressing assistance scheme, which is unprecedented in previous research. In the scheme, an interactive robot joins hands with the human thus supporting/guiding the human in the dressing process, while the dressing robot performs the dressing task. This work represents a paradigm shift of thinking of the dressing assistance task from one-robot-to-one-arm to two-robot-to-one-arm.
Tony Punnoose Valayil from the Bulgarian Academy of Sciences Institute of Robotics wrote in to share some very low-cost hand-rehabilitation robots for home use.
In this video, we present a robot-assisted rehabilitation of the wrist joint which can aid in restoring the strength that has been lost across the upper limb due to stroke. This robot is very cost-effective and can be used for home rehabilitation.
In this video, we present an exoskeleton robot which can be used at home for rehabilitating the index and middle fingers of stroke-affected patients. This robot is built at a cost of 50 euros for patients who are not financially independent to get better treatment.
Some very impressive work here from the Norwegian University of Science and Technology (NTNU), showing a drone tracking its position using radar and lidar-based odometry in some nightmare (for robots) environments, including a long tunnel that looks the same everywhere and a hallway full of smoke.
I’m sorry, but people should really know better than to make videos like this for social robot crowdfunding by now.
It’s on Kickstarter for about $300, and the fact that it’s been funded so quickly tells me that people have already forgotten about the social robotpocalypse.
Introducing Orbit, your portal for managing asset-intensive facilities through real-time and predictive intelligence. Orbit brings a whole new suite of fleet management capabilities and will unify your ecosystem of Boston Dynamics robots, starting with Spot.
 becomes -------->
becomes --------> 


 Boston Dynamics CEO Robert Playter said the head on the new Atlas robot has been designed not to mimic the human form but rather “to project something else: a friendly place to look to gain some understanding about the intent of the robot.”Boston Dynamics
Boston Dynamics CEO Robert Playter said the head on the new Atlas robot has been designed not to mimic the human form but rather “to project something else: a friendly place to look to gain some understanding about the intent of the robot.”Boston Dynamics
 Boston Dynamics
Boston Dynamics Boston Dynamics
Boston Dynamics Boston Dynamics
Boston Dynamics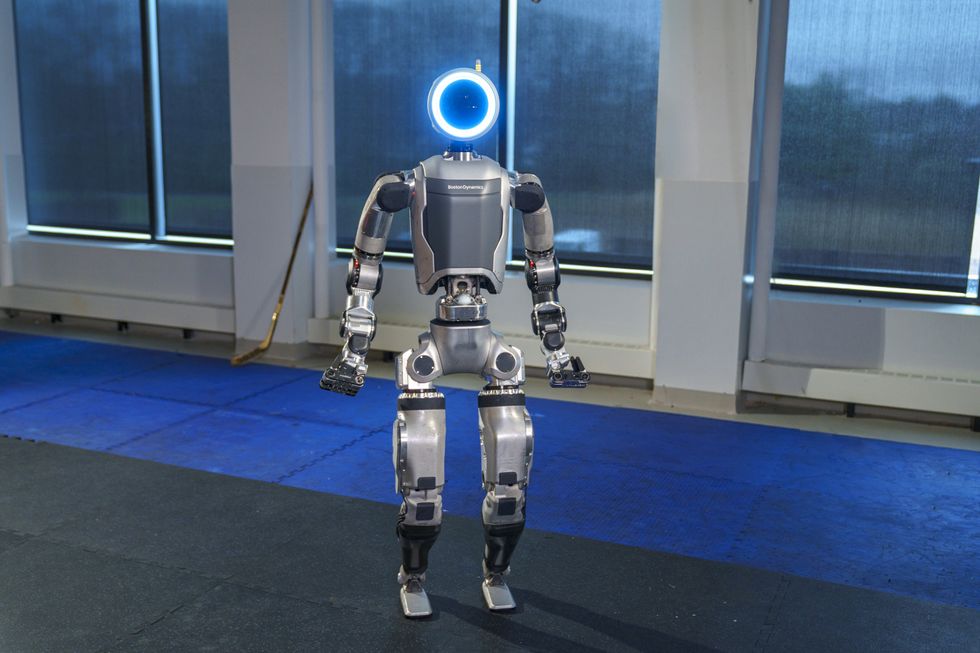
 The original rendering of Atlas, followed by four generations of the robot.Boston Dynamics/IEEE Spectrum
The original rendering of Atlas, followed by four generations of the robot.Boston Dynamics/IEEE Spectrum